

的开发仍然是触觉感知的技能应战。关于传统的非触摸式传感,一般运用视觉辨认和声学反射。视觉辨认检测更适合长间隔检测,长间隔检测受分辨率约束,一般会被短间隔内的其他事物遮挡。声反射检测既可以适用于短间隔检测,也可以适用于长间隔检测,但发射超声波比较来说较高的功耗将极大地约束其运用场景。此外,传统的非触摸式传感办法一般难以运用于柔性传感器中。
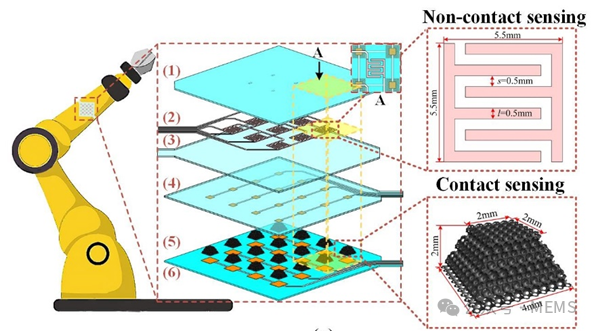
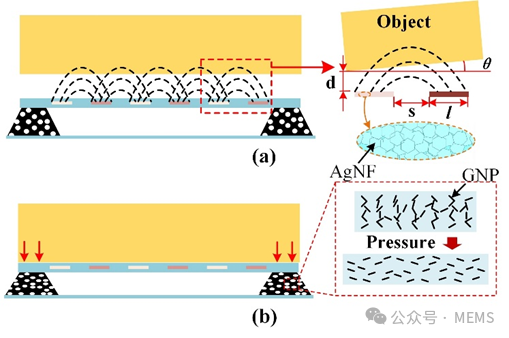
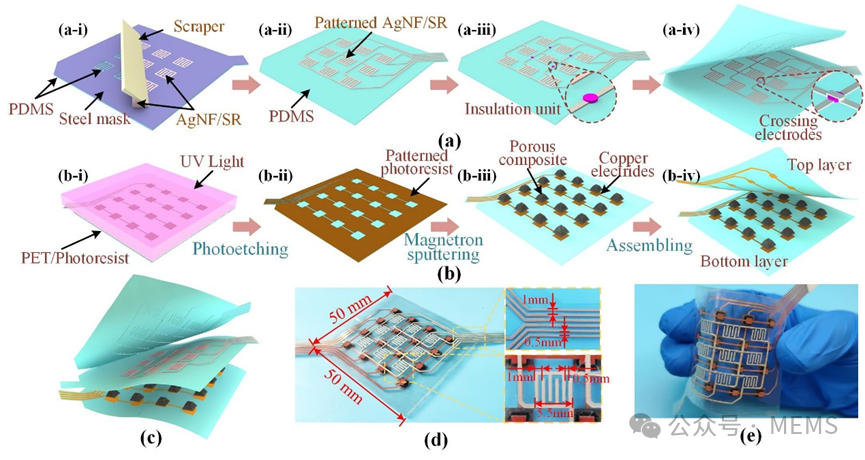
本文所提出的传感器结构如图1所示。柔性传感器上层为3×3的依据电场检测原理的平面叉指电极阵列,用于丈量非触摸间隔信息。基层为4×4的截锥形压力传感单元,用于丈量外部触摸压力。两种感知单元都经过级联组件和不同的检测单元嵌套安置进行封装,意图是削减不同信号之间的搅扰。传感器的作业原理和制作流程如图2和图3所示。
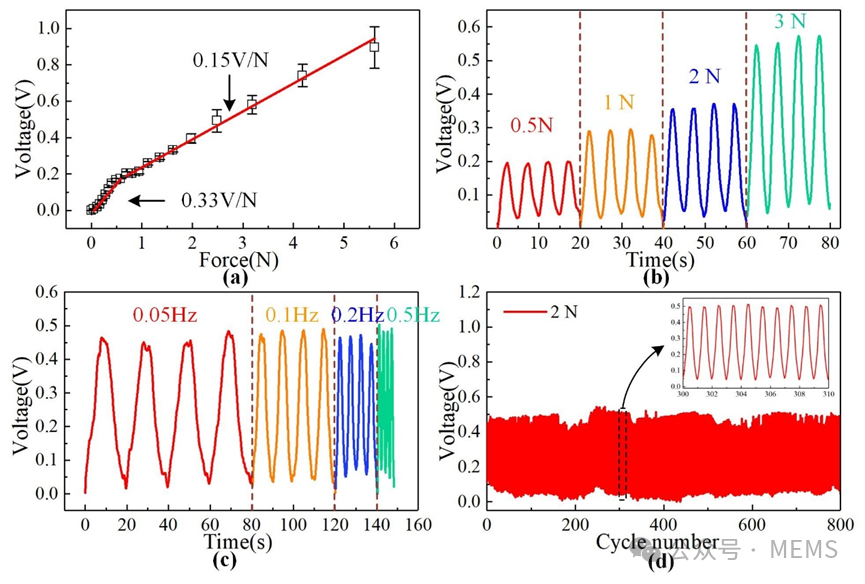
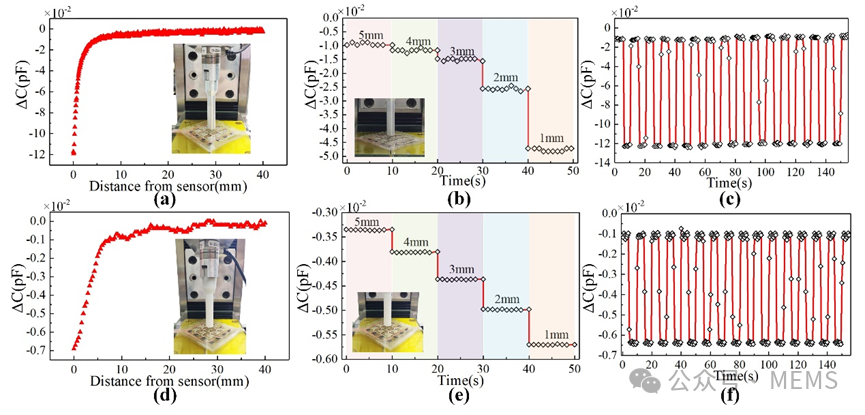
制备的柔性双模态传感器具有0.33V/N的压力测验高活络度以及5.5N的压力查验测验规模,4cm内对绝缘物体和导电物体均具有高活络间隔查验测验才能,此外传感器还具有十分杰出的信号稳定性和可重复性,传感器的详细信号测验成果别离如图4和图5所示。
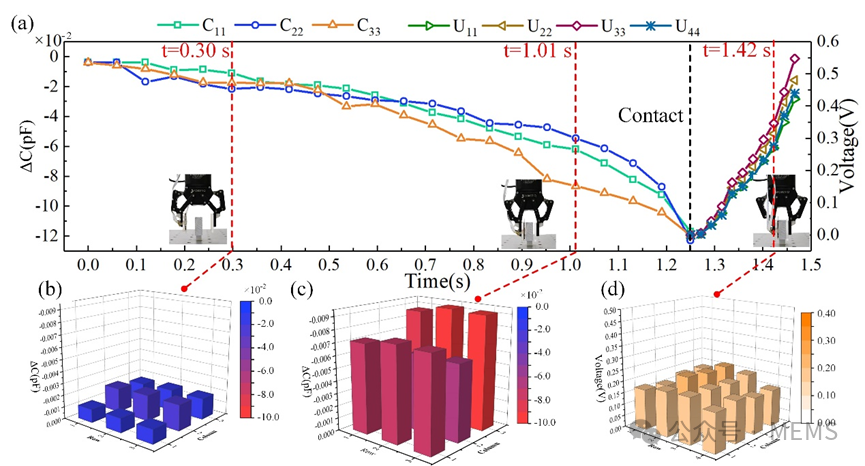
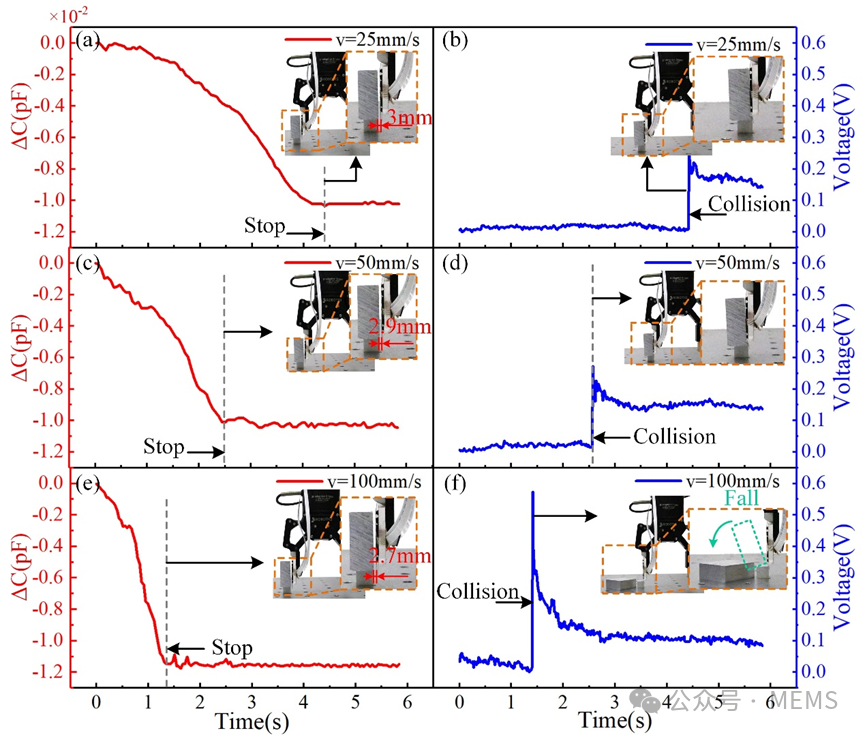
随后将双模态传感器安装在机械臂上,进行物体的抓取和碰撞检测试验,如图6和图7的依据成果得出,该传感器能精确丈量物体之间的散布触摸力和间隔,完成全过程的触觉感知,所提出的传感器在机器人操作和安全作业运用中具有巨大的潜力。
文章出处:【微信号:MEMSensor,微信大众号:MEMS】欢迎增加重视!文章转载请注明出处。
据麦姆斯咨询报导,近来,中国科学院空天信息立异研讨院陈嘉民研讨团队开发了一种
的关键技能剖析 /
技能研讨 /
体系 /
的优化与运用研讨进展 /
介绍 /
怎么运用TinyVision去手动构建Linux 6.1+Debian 12镜像呢?
因为 Windows 无法加载这个设备所需的驱动程序,导致这个设备作业反常?